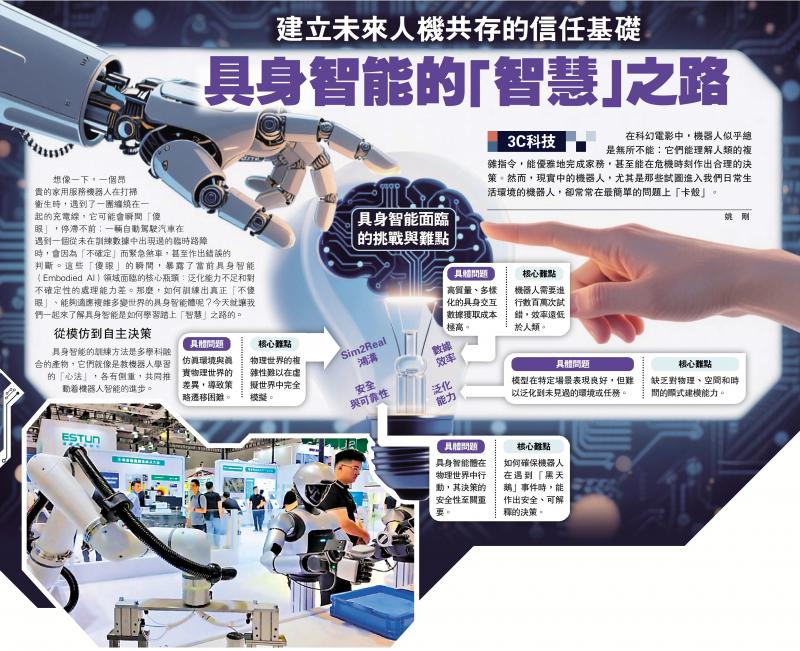
图:具身智能的“智慧”之路
在科幻电影中,机器人似乎总是无所不能:它们能理解人类的复杂指令,能优雅地完成家务,甚至能在危机时刻作出合理的决策。然而,现实中的机器人,尤其是那些试图进入我们日常生活环境的机器人,却常常在最简单的问题上“卡壳”。\姚 刚
想像一下,一个昂贵的家用服务机器人在打扫卫生时,遇到了一团缠绕在一起的充电线,它可能会瞬间“傻眼”,停滞不前;一辆自动驾驶汽车在遇到一个从未在训练数据中出现过的临时路障时,会因为“不确定”而紧急煞车,甚至作出错误的判断。这些“傻眼”的瞬间,暴露了当前具身智能(Embodied AI)领域面临的核心瓶颈:泛化能力不足和对不确定性的处理能力差。那么,如何训练出真正“不傻眼”、能够适应复杂多变世界的具身智能体呢?今天就让我们一起来了解具身智能是如何学习踏上“智慧”之路的。
从模仿到自主决策
具身智能的训练方法是多学科融合的产物,它们就像是教机器人学习的“心法”,各有侧重,共同推动着机器人智能的进步。
强化学习(RL):像训练宠物一样,通过“奖励”学习
强化学习是具身智能中最核心的训练方法之一。智能体(机器人)通过不断地尝试各种动作,并根据环境的反馈获得“奖励”或“惩罚”。它的目标是找到一套最优的行动策略,以最大化它获得的累积奖励。然而,它面临的主要挑战是样本效率低下。在真实世界中,机器人需要进行数百万次的试错才能学会一个简单的任务,这不仅耗时,而且可能损坏机器人或环境。此外,奖励函数的设计也极其困难,奖励设计得不好,机器人可能会学会“作弊”来获得高分,而不是真正地完成任务。
模仿学习(IL):看着学,快速入门
模仿学习是解决强化学习样本效率低下的一个有效途径。机器人不再自己摸索,而是直接从人类或专家的示范数据中学习。最常见的形式是行为克隆,即直接将人类的输入(如视觉图像)映射到输出动作,就像一个学徒“看着师傅做”。但它的挑战在于无法超越专家表现,而且对示范数据的质量要求极高。更重要的是,一旦机器人遇到训练数据中未曾出现过的新情况,它就会不知所措,表现会迅速恶化。
Sim2Real:在虚拟世界练兵,降低成本
由于真实世界训练成本高昂,科学家们提出了Sim2Real(从仿真到现实)的方法。在虚拟仿真环境中训练机器人策略,然后将学到的策略迁移到真实机器人上。仿真环境可以安全、快速地采集海量数据,并利用强化学习等高效训练方法。就像飞行员在模拟器中进行数千小时的训练,直到熟练掌握各种紧急情况的处理,然后才登上真正的飞机。然而,它面临着具身智能领域的经典难题——虚拟世界和真实世界的物理差异(如摩擦力、光照、传感器噪声)是不可避免的。在仿真中表现完美的策略,到了现实中可能会“水土不服”。
结语
训练具身智能的历程,是一部让其从“机械化工具”迈向“自主化伙伴”的进化史。我们教会了它模仿,教会了它提问,教会了它探索,如今正在教会它交互式学习。
如何让机器在充满未知的真实世界里,依然可靠、安全地工作,这不仅关乎技术,更关乎未来人机共存的信任基础。当机器真正学会了在不确定中思考与求助,我们迎来的,将不仅仅是一个更智能的机器,还是一个更理解人类意图的协作新时代。

 京公网安备11010502037337号
京公网安备11010502037337号